
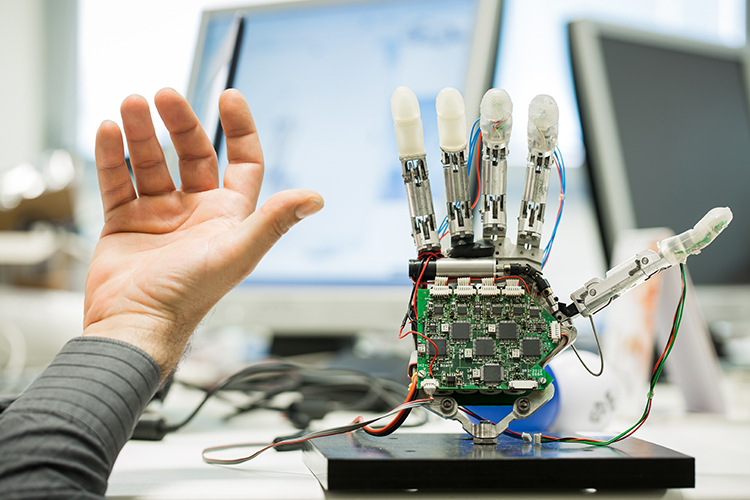
Ученые Политехнической школы Лозанны разрабатывают новые подходы для улучшенного управления роботизированными руками, в частности, для людей с ампутированными конечностями, которые сочетают индивидуальное управление пальцами и автоматизацию для улучшенного захвата и манипулирования. Это междисциплинарное доказательство концепции между нейроинженерией и робототехникой было успешно протестировано на трех пациентах с ампутированными конечностями и семи здоровых субъектах. Технология объединяет две концепции из двух разных областей. Внедрение их обоих вместе никогда не было сделано ранее для роботизированного ручного управления и вносит вклад в появляющуюся область общего контроля в нейропротезировании. Одна концепция, от нейроинженерии, включает в себя расшифровку предполагаемого движения пальца от мышечной деятельности на культю человека с ампутированной конечностью для индивидуального управления пальцем протезной руки, что никогда прежде не было сделано. Другой, от робототехники, позволяет роботизированной руке удерживать предметы и поддерживать с ними контакт для надежного захвата. «Когда вы держите объект в руке, и он начинает скользить, у вас есть всего несколько миллисекунд, чтобы среагировать», – объясняет Од Биллард, который возглавляет Лабораторию алгоритмов обучения и систем EPFL. «Роботизированная рука способна реагировать в течение 400 миллисекунд. Оборудованная датчиками давления по всей длине пальцев, она может реагировать и стабилизировать объект до того, как мозг действительно почувствует, что объект скользит».
Как это работает?
Алгоритм сначала узнает, как декодировать намерение пользователя, и преобразует это в движение пальца протезной руки. Человек с ампутированной конечностью должен выполнить серию движений рук, чтобы обучить алгоритм, который использует машинное обучение. Датчики, помещенные на культю пациента, обнаруживают мышечную активность, и алгоритм определяет, какие движения рук соответствуют каким образцам мышечной активности. Как только предполагаемые движения пальцев пользователя понятны, эта информация может использоваться для управления отдельными пальцами протезной руки.
Затем ученые разработали алгоритм так, чтобы автоматизированная система запускалась, когда пользователь пытается схватить объект. Алгоритм предписывает протезу закрывать пальцы при контакте объекта с датчиками на поверхности протеза. Этот автоматический захват является адаптацией из предыдущего исследования для роботизированных рук, предназначенных для определения формы объектов и захвата их на основе только тактильной информации, без помощи визуальных сигналов.
Многие проблемы остаются для разработки алгоритма, прежде чем он может быть реализован в коммерчески доступной протезной руке для пациентов с ампутированными конечностями. На данный момент алгоритм все еще тестируется на роботе, предоставленном сторонней организацией.
Материалы Политехнической школы Лозанны. Автор Хиллари Сантуари.